safeHDDM: tehnologia ceasigură o nouă platformă pentru securitatea industrială
Tehnologia safeHDDM se bazează pe procesul deja implementat cu succes de către SICK la senzorii de distanţă (HDDM=high definition distance measurement). Tehnologia de scanare safeHDMD aduce un nou nivel de calitate în analiza ce se bazează pe măsurarea de tip time-of-flight.
Şi aceasta nu este totul: scannerul de securitate microScan3 emite până la 80000 de pulsuri individuale la o singură scanare efectuată – în comparaţie cu procesele convenţionale de măsurare, această caracteristică asigură mult mai multe date disponibile pentru procesare, fapt ce contribuie la detecţii mai fiabile şi mai precise. microScan foloseşte o multitudine de pulsuri individuale pentru a calcula 700 de valori măsurate de securitate. Noile filtre alături de algoritmii inteligenţi asigură că tehnologia safeHDDM este o tehnologie sigură şi că microScan3 este capabil să detecteze chiar şi acele obiecte care au remisie optică de 1,8%, aşa cum, spre exemplu, sunt hainele de culoare neagră. În acelaşi timp, noua tehnologie creează fiabilitate îmbunătăţită chiar şi atunci când lumina ambientală şi praful sunt prezente în mediul de producţie.
Securitatea funcţională în aplicaţiile de colaborare om-robot industrial
Gradul crescut de automatizare în comparaţie cu producţia flexibilă se referă la următorul aspect: dacă se impune ca oamenii şi maşinile să conlucreze în imediata lor apropiere cu menţinerea în acelaşi timp a unui nivel corespunzător de securitate, securitatea funcţională va duce sistemele actuale de producţie cu un pas mai aproape de o flexibilitate mai mare. Principiile pe baza cărora se pot implementa aplicaţii sigure de colaborarea om-robot vin să arate cum se pot obţine medii sigure de producţie.
Există diverse forme de automatizare ce depind de modul în care maşinile şi oamenii lucrează împreună. Dacă scopul final este cel ce implică o colaborare completă – unde oamenii şi roboţii partajează acelaşi spaţiu de lucru şi îşi îndeplinesc sarcinile de producţie concomitent – atunci are sens dezvoltarea de soluţii care să implice coexistenţa sau cooperarea ca paşi iniţiali de implementare a respectivului scop. Implementarea presupune nu numai înţelegerea pe deplin a aplicaţiilor cu roboţi industriali, dar şi existenţa unei expertize în evaluarea riscurilor şi în accesarea portofoliului corespunzător de soluţii de securitate industrială.
Colaborare om-robot
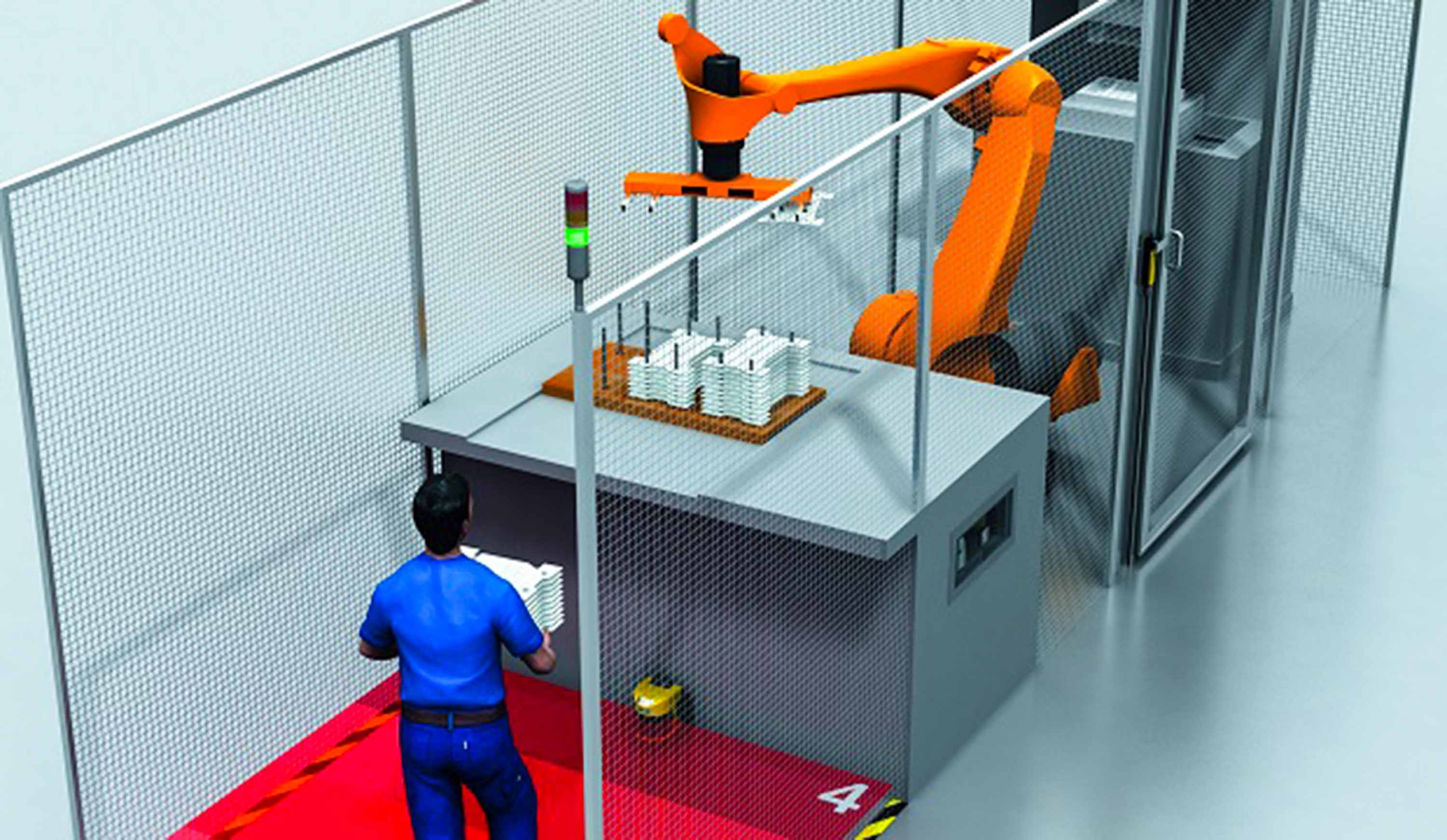
Ataşarea părţilor non-rigide a motoarelor electrice este o astfel de aplicaţie. Un robot monitorizat din punct de vedere al securităţii în funcţionare, dispus într-o staţie mobilă de producţie, preia subansamble de la un conveior şi le pune la dispoziţia operatorului într-o poziţie ergonomică pentru acesta.
– evaluare de risc: mişcările robotului pot produce coliziuni, tăieri sau striviri ale membrelor operatorului;
– protecţii posibile: protecţia orizontală a zonei periculoase cu scannerul de securitate industrială microScan3 de la Sick, în vederea limitării accesului în spaţiul cartezian de lucru împotriva forţei şi cuplului dezvoltat de braţul robotizat sau monitorizarea vitezei de lucru când câmpul de protecţie al scannerului este accesat accidental de către operator; de asemenea, o măsură suplimentară poate fi acoperirea carcasei robotului astfel încât să se reducă pericolele de accidentare;
– productivitate crescută: staţia robotizată este mobilă şi poate fi folosită în diverse puncte de lucru, după cum este nevoie; robotul apucă subansamblele potrivite de la conveior şi este capabil să îndeplinească în mod independent paşi subsecvenţi ai procesului de producţie.
Cooperare om-robot
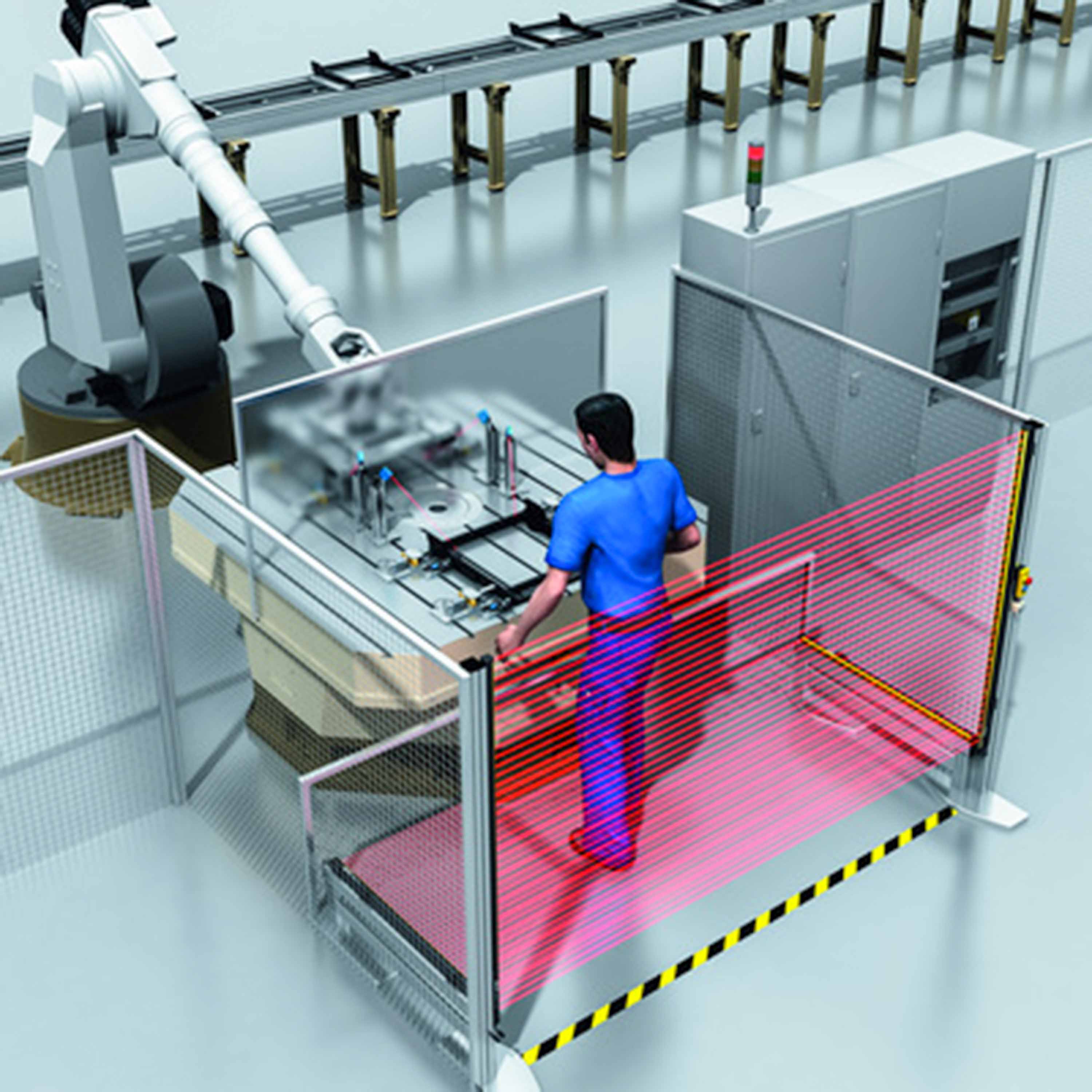
La o staţie de transfer un operator preia modulele preasamblate şi pregătite pentru un robot de asamblare. Robotul preia câte un produs pe rând şi îl dispune în procesul final de asamblare.
– evaluare de risc: robotul şi operatorul sunt activi în zona de transfer la momente diferite de timp; când operatorul inserează modulele poate apărea un pericol de lovire datorită mişcării rapide a robotului;
– protecţii posibile: scannerul laser de securitate S3000 cu 4 câmpuri simultane de protecţie, combinat cu controllerul de securitate Flexi Soft; pătrunderea în câmpurile de protecţie 1, 2 sau 3 activează o reducere a vitezei robotului, iar pătrunderea în câmpul 4 iniţiază o oprire monitorizată din punct de vedere al securităţii;
– productivitate crescută: în loc să se oprească complet, robotul iniţial continuă să opereze pe măsură ce operatorul se apropie; mişcarea robotului este oprită în condiţii sigure doar în cazul în care operatorul pătrunde în imediata proximitate a zonei de operare a robotului; odată ce operatorul iese din câmpul de protecţie 4, robotul îşi reia automat activitatea.
Coexistenţă om-robot
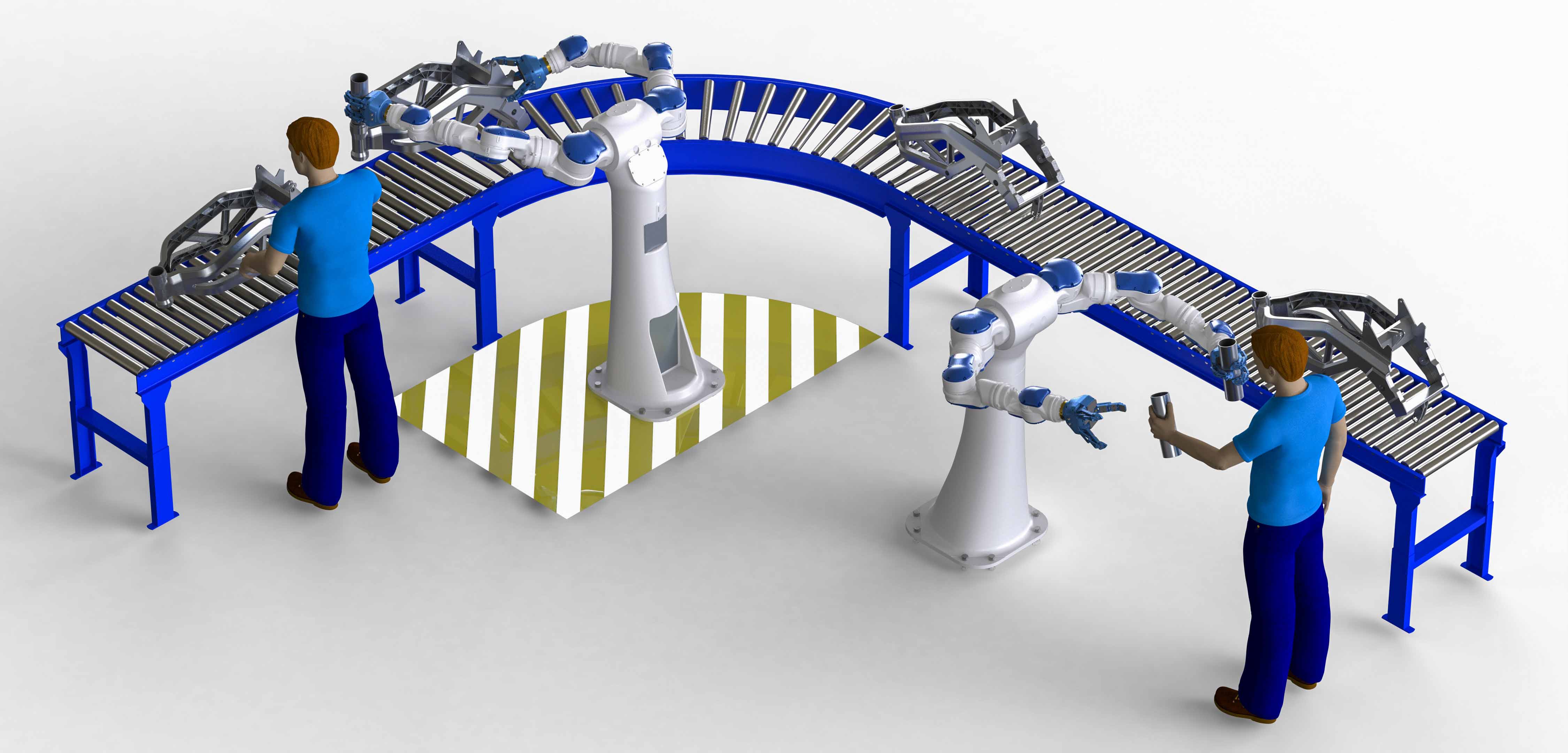
O staţie de inserare cu o masă rotativă integrată într-o celulă robotizată destinată sudurii este o aplicaţie des întâlnită în special în industria auto.
– evaluare de risc: pericolul este prezent datorită mişcării mesei rotative, având în vedere că robotul operează într-o zonă îngrădită complet şi, în consecinţă, securizată;
– protecţii posibile: o cortină optică montată vertical, precum cea din seria deTec4 Prime, poate funcţiona precum o măsură primară de protecţie pentru oprirea masei rotative; suplimentar se poate monta orizontal o cortină optică pentru detecţia eventualelor persoane care ar putea staţiona în zona periculoasă, zonă nemonitorizată de cortinele instalate vertical;
– productivitate crescută: masa rotativă este capabilă să repornească în mod automat odată ce câmpul de protecţie al cortinelor optice de securitate montate orizontal este eliberat.
Produsele Sick fac parte din oferta Aurocon COMPEC. Solicitaţi mai multe detalii la sick@compec.ro
Author: Mihai Priboianu
Aurocon COMPEC distribuitor autorizat SICK